suivant: L'algorithme de Verlet monter: Simulation de trajectoires précédent: Simulation de trajectoires Table des matières
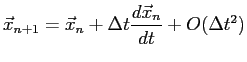
La méthode la plus simple pour calculer une trajectoire est la méthode d'Euler. Elle fut créée bien avant l'arrivée des premiers ordinateurs. Elle consiste à se baser sur le premier ordre du développement limité cité précédemment
 |
(2.3) |
où ![]() est le pas de temps.
est le pas de temps.
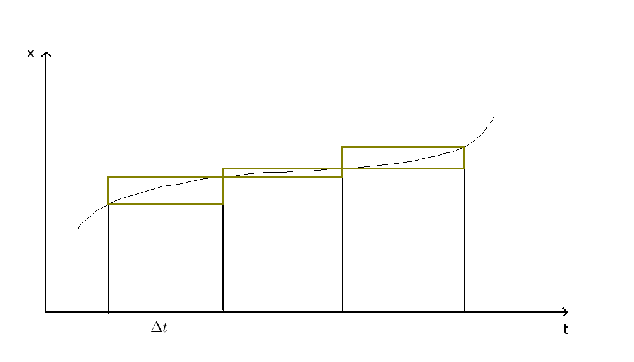
Géométriquement, cette méthode consiste à
remplacer la courbe par une série de rectangles telle que la différence entre les hauteurs
de deux rectangles consécutifs soit proportionnelle
au produit de la dérivée par le pas de temps à l'instant considéré
(Fig 2.2).
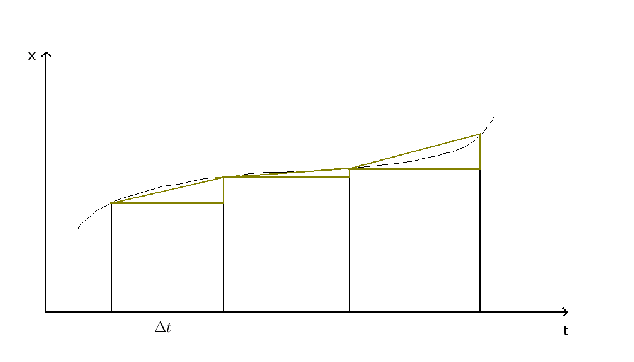
Une méthode un peu plus précise, la méthode de Runge-Kutta d'ordre deux, consiste à utiliser des triangles plutôt que des rectangles pour approximer la courbe en effectuant deux évaluations de la dérivée pour chaque pas de temps (Fig 2.3). L'une au début du pas de temps et l'autre à la fin:
 |
(2.4) |
et
 |
(2.5) |
Nous obtenons la valeur approximée de la courbe au pas de temps suivant par:
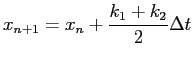 |
(2.6) |
La méthode de Runge-Kutta
peut être généralisée à des ordres supérieurs, en effectuant un plus
grand nombre d'évaluations de la fonction ![]() , ce qui permet de diminuer encore
l'erreur commise.
Cependant ces méthodes peuvent être améliorées dans le sens où le nombre de
calculs à faire pour une précision voulue est encore important. Ainsi,
d'autres méthodes plus performantes ont vu le jour. Ces méthodes permettent
de suivre efficacement un grand nombre de trajectoires simultanément.
, ce qui permet de diminuer encore
l'erreur commise.
Cependant ces méthodes peuvent être améliorées dans le sens où le nombre de
calculs à faire pour une précision voulue est encore important. Ainsi,
d'autres méthodes plus performantes ont vu le jour. Ces méthodes permettent
de suivre efficacement un grand nombre de trajectoires simultanément.